In praesenti, plerique actuatores in foro habent duas rationes vi moderandi modos;
1. Current vi loop imperium
Facilis ad effectum deducendi vim conventionalem methodum moderandi, quae vim obtinet, accommodando internam motoris cursum.Utilitas est quod minus difficile est ad effectum deduci, et vim potestatem consequi potest intra fines 5%-15% accurationis;incommodum est quod celeritas motus tarda est, non vicissim agi potest, neque potest aliquarum missionum necessitatibus occurrere cum accuratius requisitis.Post tempus usus, mechanica vestis errores afferet et accurationem ulteriorem minuet.
Actores tales plerumque sensores non habent, et etiam si sensorie sunt, tantum "monstrationes" adhibentur virium ac potestatem non participant.Exempli gratia, sensorem ad torcular addens, sensorem legit magnitudinem virium, et ostendit valorem per metrum, quod adhibetur ad adiuvandum compositionem manualem quantitatis virium, sed talis commensuratio fere nihil ad rem pertinet. cum accuratione vi.

Schematica schematismi, ad graphics et textum non refertur
2. sensorem clausi-loop vi imperium
Alia vis dicionis methodi est addere vim conventionalem sensorem et conventionalem algorithmum imperium clausum-loop.Utilitas est ut accurate emendatur, sed incommodum est quod celeritas adhuc tarda est.Hoc modo vis accurationis ab 5% ad 1% augeri potest.Si processus algorithmus emendatus non est, vel velocitas sensoris non satis hercle est, prona est ad "luxorem".
Force Controlled Actus
Inevitabilis "LUXURIA"?
Vim autocineticam clausae methodi sensoris moderandi vim ictum cum difficultate agere difficile est.Rectissima manifestatio est quod "Luxin" facillime evenire potest cum de scaenarum maximis tempo requisitis.
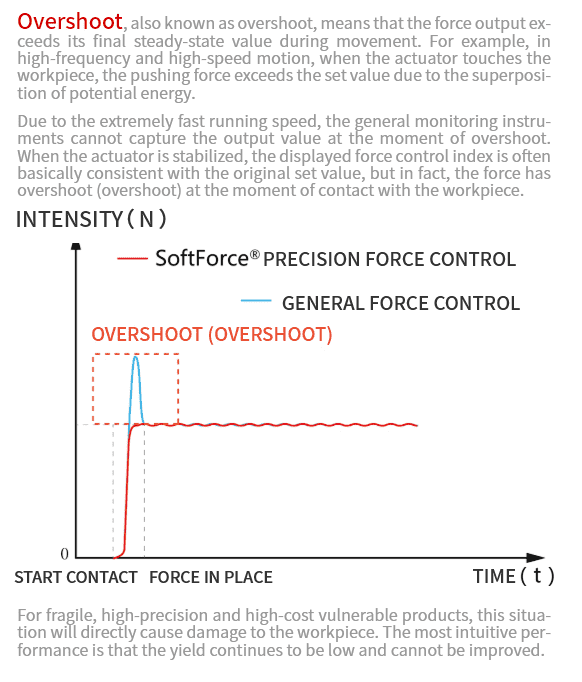
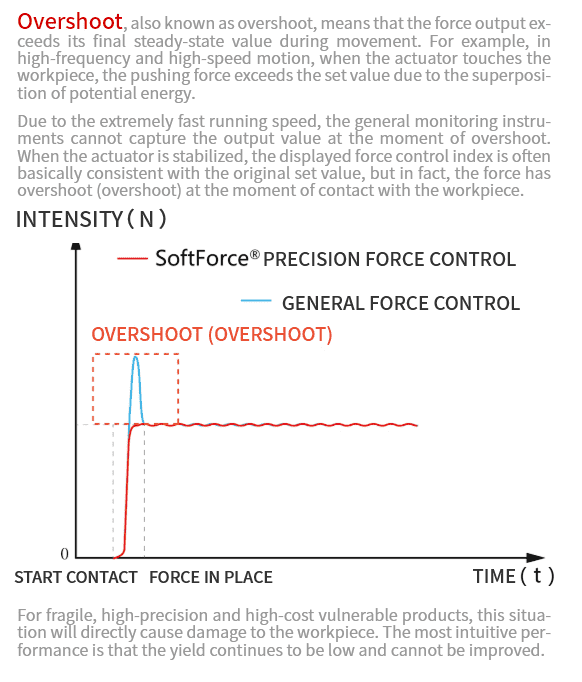
exempli gratia
Plerumque, in magna celeritate et in magna output, momentum cum actus contactum workpiece est saepe praecipue magnum.Exempli causa, si vis actus actatoris ad 10N ponitur, facile est ad 11N et 12N cum artificium attingit, et tunc ad 10N per algorithmum imperium revocatur.Talia problemata saepe occurrunt, cum vis sensoriis et actuatoribus sic dictis vis sobrie foro accedunt.
Haec quaestio non hercle satis est responsionis celeritatem.Magna celeritas et certa et stabilis condicio par contradictiones in seipsis sunt.Si LUXURIA (LUXURIA est), vis exacta in loco vanitas est.
Praesertim in subtilitate instrumenti processus pressionis conventus, fragilis et costarum partium, fasciculi plerumque non licet.
Plena vis castitatis, alta frequentia, et sine LUXURIA SINE LUXURIA?
TA quomodo facit?
Ad applicationes missionum altae praecise, methodus "exscensionis mollis" assumitur ad rationem exigentias altae celeritatis et subtilitatis, id est, vis divisae ditionis.Actus celeriter ad fabricam per modum positionem motus appropinquat, celeriter ad vim modi moderandi in positione ubi opusculum contacturus est, paulatim augescit, donec ad valorem pretii attingit.Modus positus + vis temperantia modus + vis temporis stabilizationis, totum tempus adhibitum est unica effectiva effectiva actus.
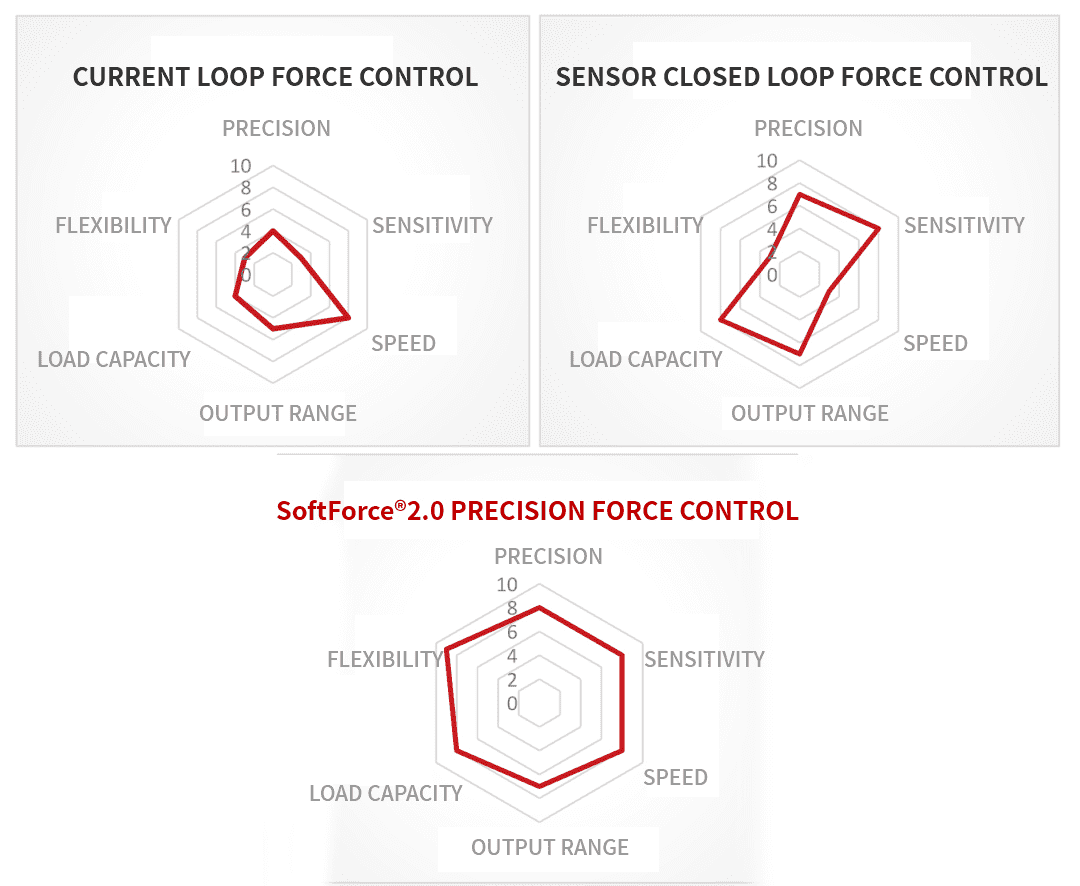
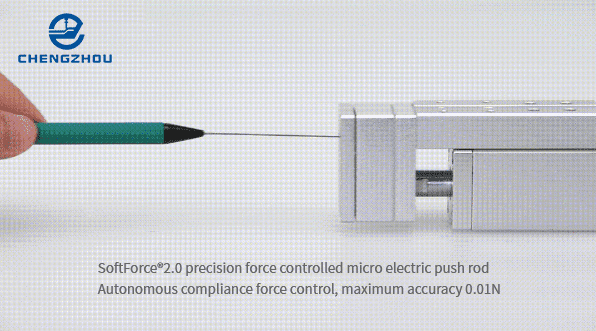
Cum summa celeritate coniuncta vis sensoris et exemplar-substructio algorithmus predictive dominii, SoftForce®2.0 praecisio vis actuatoris continentis potest automatice cognoscere positionem actus et contactum civitatis cum workpiece, ita ut actus, sicut finis automationis. armorum, idem ac manus humana.tangendi perceptio, moderatio et intellectus executio.
Eodem spatio, mollis aditus celeritatis ampliatio "SoftForce ®2.0 Precision Force Control" augetur, tolerantia maior est, et etiam plenam vim continere potest, quae cycli productionis directe emendatur et sumptus iudicii ac multum minuit. erroris verificationem.
High processui frequency ad consequi melius perficientur
cyclus calculus "sex-axis vis sensoris + robot" vis temperationis schema communiter in foro adhibitum est 5-10 milliseconds, hoc est, frequentia processus 100-200 Hz est.Processus frequentiae SoftForce®2.0 praecisionis actuum moderatorum 4000Hz (ie 0,25 millium secundorum) attingere potest, et summa frequentia exemplorum series 8000Hz attingere potest, quod est 4-8 pluries processus frequentiae actuatorum roboti generalis vis moderatae.
Vir obsequentem imperium activae, quae mutationem vim externam sequi potest
Effectus responsionis rate et vis instantaneae feedback efficiens actuator ut in instanti respondeat viribus externis et actuosam obsequentem vim obtineat.Etiamsi copiae externae in operatione concurruntur, tempore adaptari potest, processus accuratior efficiens.Melior munimen officinis.
Princeps frequentia et summus celeritas sine LUXURIA
Etiam sub magno motu frequentia et celeritate alta, accurationem tamen altam conservat, simulque portum mollem ac «luxorem» efficit, contactum partium superficiem cum summa celeritate, parva manu, flexibilem efficit. partium lectu et collocatione, etc., ad vitandum damnum partium subtilium et fragilium.tium.
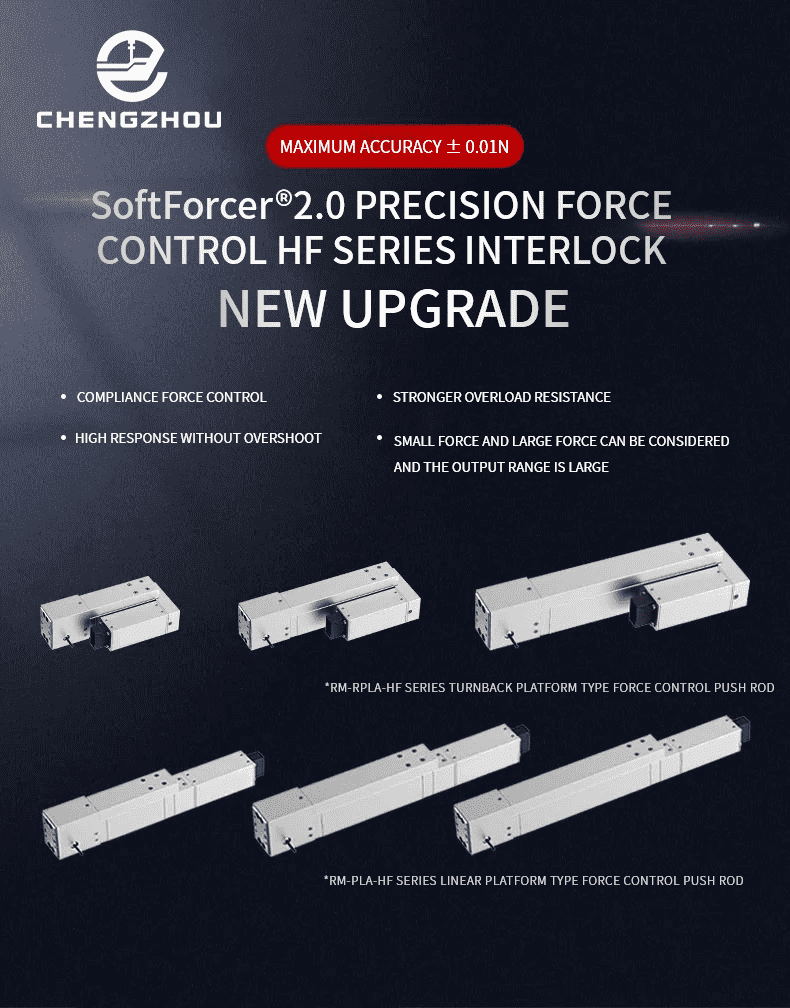
SoftForce®2.0 Subsecutio Force Control
HF series novae upgrade
Fortior anti-onerare facultatem
Substructio in profundis intellectus in-site processus et plures iterationes, Chengzhou noviter upgraded SoftForce®2.0 praecisionem vis temperantiae HF seriei in Februario hoc anno integram sensorem consilium habet, et eius anti-onerare facultatem pluries altior est quam in praeterito, superiora vetustate et facilitate usus.Cope cum conditionibus multiplicioribus.
Potest considerare tam parva vis et magna output
Instructus cum SoftForce®2.0 summus praecisio vis control systematis, praecisio vis moderata tabulae labis et virga impulsus cum magno ictu et magna onere generare potest vim parvam et accuratam sub alto onere, et quoque vim in eodem habere potest. tempus, et latius output range.Maior, ie vis latius dynamica*.
*Vis Dynamic Range: Proportio inter vim maximam et minimam quae output esse potest.
Subsecutio vis control non potest esse nisi in axe unico
SoftForce®2.0 praecisio vis actuatorum continentium non solum in uno axe adhiberi potest, sed etiam plura possibilitates pro multi-axi conventus solutionibus praebere.Exempli gratia, novissima "RM Chengzhou 2D Synchrona Subsecutio Force Control Platform Control System" deductae a Chengzhou Technologia composita est ex duobus actuatoribus electricis Chengzhou praecisio vis moderatis, quae vim "sex-axis sensoris + roboti" schematis continere potest. adhibita ad subtilitatem stridor et deficiens interiorum machinarum mobilium etc.
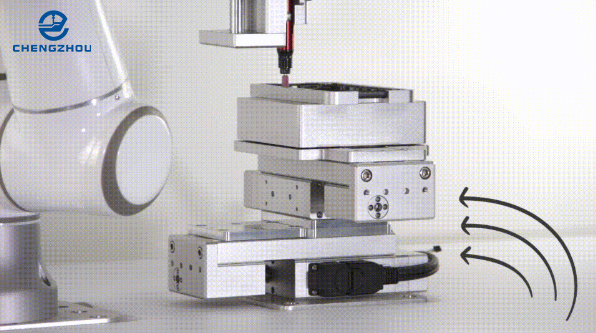
Chengzhou 2D synchronum praecisionem vis imperium tribunal imperium systema
(Instructus cum SoftForce®2.0 summus praecisione vis potestate ratio)
Urbanus et facilis ad usum professionalem officia
Provecta moderatio algorithmus et processus debugging simplex commodam user experientiam ad clientes afferunt.Etiam operator in plano humili gradu 5 incipiri potest, nempe "obturaculum et ludere".
Eodem tempore Chengzhou technicae artis professio et fortis post venditionesque technicae servitutis equos praebere potest clientibus opportune, comprehensivo et solliciti libero technico auxilio primum, utrum dubia sit technica, doctrina, fermentum vel sustentatio.
Technologia Chengzhou satis fortis ad fines suos dilatandos semper fuit.Cum solidis et technicis technicis viribus, continenter plus intelligentes, accuratiores et compatibiles actuator qualitates altas induxit ut provectos fructus pro semiconductore packaging et experimento, 3C automation, praecisione fabricandi, medicinae et aliae industriae captiosae praebeant.nuclei nuclei ut praecisio motus rationum et actuatorum moderatio.
Post tempus: May-31-2022